超声成像方法与波束形成Beamforming
超声成像方法与波束形成Beamforming
一、超声成像方法
超声成像方法指的是:发射端的方法
1.1 传统方法
1.1.1 电子延迟线扫成像
只要一次发射,经过波束形成后,图像中生成的都是一条线(也就是扫描线,或者说是一个一维向量),那就都是线扫
通过施加电子延迟,实现线扫,
有没有焦点:有,虽然是线扫,但是也要发射聚焦到一个深度点上
1.1.2 电子延迟扇扫成像
只要一次发射,经过波束形成后,图像中生成的都是一条线(也就是扫描线,或者说是一个一维向量),那就都是线扫
1.2 新型方法
1.2.1 合成孔径成像SA
合成孔径成像启发于雷达的合成孔径,传统合成孔径成像可以参考jensen2006年的综述:Synthetic aperture ultrasound imaging - ScienceDirect

其使用一个一个阵元分别激励,使用全孔径接收,比如128阵元,就会产生128帧RF数据,之后在经过波束形成进行成像。
通过单个阵元激励合成孔径成像效果还是提升很大的

1.2.1.1 虚拟点源
虚拟点源是为了提升超声换能器的成像孔径而提出的一种方法。
其工作原理示意图:
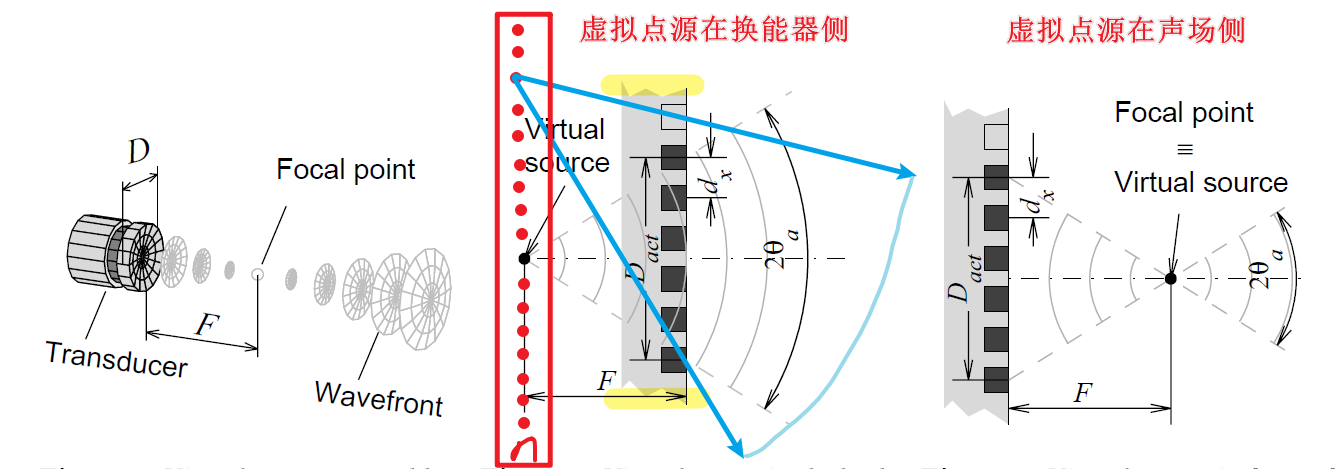
换能器阵列通过施加电子延迟,产生在换能器前或后的一个个虚拟点源。红色的一个个的点即为虚拟点源,可以将他们视为发出超声波的声源,而换能器阵列变成了声波路径上的一些途经点,变得没有意义,可以忽略他们的存在,之后在计算任何delay的时候,只需要考虑这一帧是这一个红色的点源发出的声波即可。
观察虚拟点源在换能器侧示意图,可以看到,本来换能器孔径只有比较小的范围,但是通过虚拟点源方法,相当于扩展了其孔径,理论上其孔径可以扩展的无限大,孔径在一定范围内增大可以大幅提高成像的横向分辨率。如下图所示:

1.2.1.2 虚拟点源在换能器侧
如上上图所示,当虚拟点源在换能器侧时,其就相当于在换能器侧有一个点源发出声波,而不是换能器阵元面发射,后面所有的波束形成等方法都以这个点源作为发射端即可。
1.2.1.3 虚拟点源在声场侧
如上上图所示,当虚拟点源在声场侧时(其实就是相当于使用电子延迟使波束聚焦在声场中一个点上,类似动态聚焦聚焦波),其就相当于在声场侧有一个点源发出声波,而不是换能器阵元面发射,那么这个声波是要先返回换能器面吗?不是的,要强调一下虚拟点源这个概念,在发射时,他就是探头,因此,我们要把他作为一个点源换能器,发射的声波直接向下面的声场传播,发射延迟因此也要改变。
但是接收延迟还是声场中的散射点距离换能器阵元的距离。
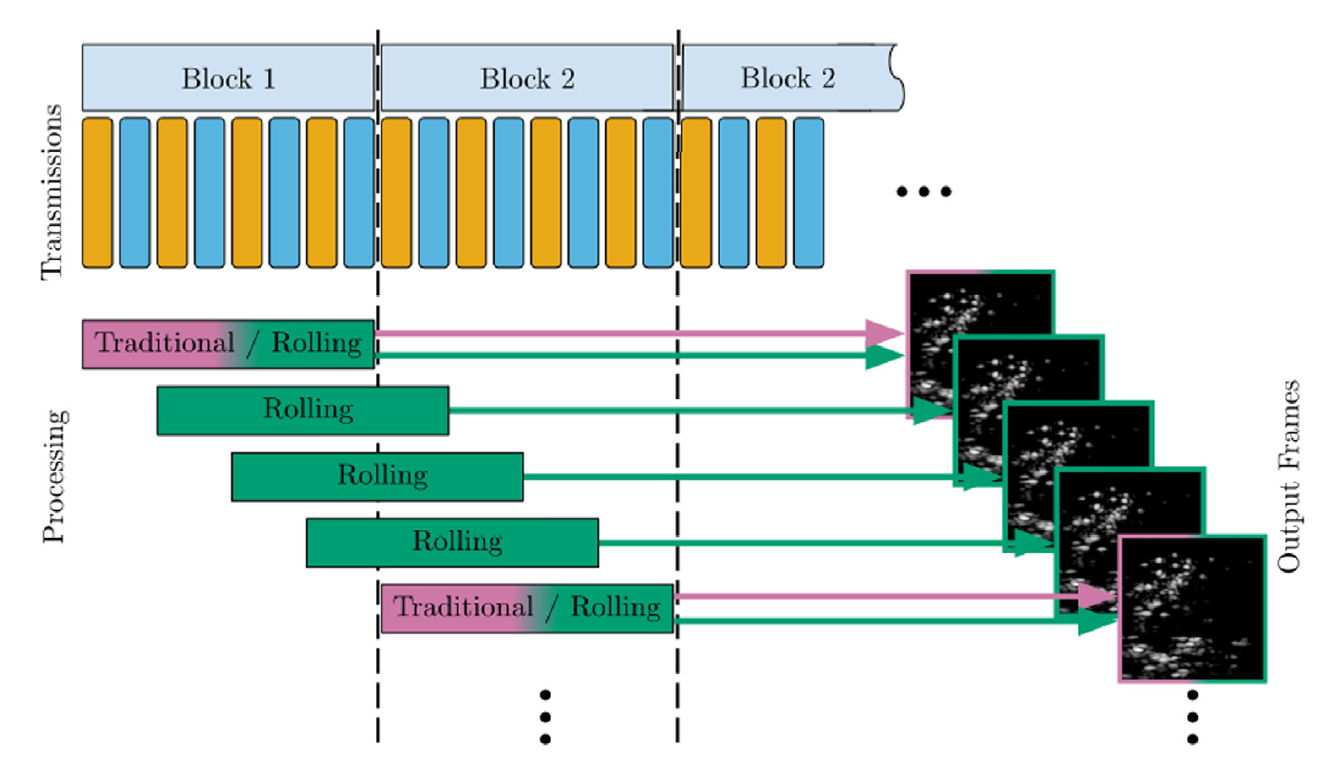
1.2.1.4 合成孔径成像提速:滑动窗口相干合成
1.2.2 平面波成像
平面波成像在原理上可以视为一种特殊的合成孔径成像
1.2.2.1 单角度平面波成像
1.2.2.2 多角度平面波相干复合成像
1.2.3 TO法 横向震动法
二、波束形成方法
2.1 什么是波束形成
波束形成和以上提出的超声成像方法有些杂糅,不好区分,这里我们做下规定:
- 波束形成不包含滤波、取包络、插值、对数变换、加窗、变迹
- 波束形成不包含超声发射方法
- 这里说的波束形成只谈对采集回来的信号进行不同的处理,以实现类延迟叠加的效果
下面正式开始:
- 黑箱理论:一个RF数据被采集回来后,经过一个黑箱,产生图像,被人眼所接收。
那么这个黑箱就格外重要,黑箱里面有什么?
有数据裁剪、滤波、取包络、波束形成、图像滤波、图像去噪、图像锐化、卷积、神经网络识别、大模型分割…….
也就是说,对于一个确定的RF数据(原始数据真实性由传感器决定),后面的黑箱,才是成像是否真、是否有意义的real决定性因素。
其中波束形成也是这里面可操作性最强之一的流程。
- 波束形成来源于自适应天线,接收端的信号处理,可以通过对多天线阵元接收到的各路信号进行加权合成,形成所需的理想信号。
超声中波束形成的定义为:通过数字延时补偿替代传统模拟延时线实现精确信号控制,其关键技术包括动态聚焦、动态孔径调整和幅度变迹,支持逐点跟踪式信号处理。该技术突破模拟系统的通道数限制,显著提升成像分辨率与稳定性。
- 插一嘴,md加矩阵的规定:
2.2 为什么要用波束形成
2.3 DAS(delay-and-sum)
2.3.1 DAS整体流程
DAS即delay-and-sum顾名思义为先延迟再相加,那么对象是谁?没错,对象就是我们通过AD采集回来的RF射频数据,这个射频数据应该有C列,分别对应C个探头;有R行,分别对应采样深度R,即为采样点个数为R。
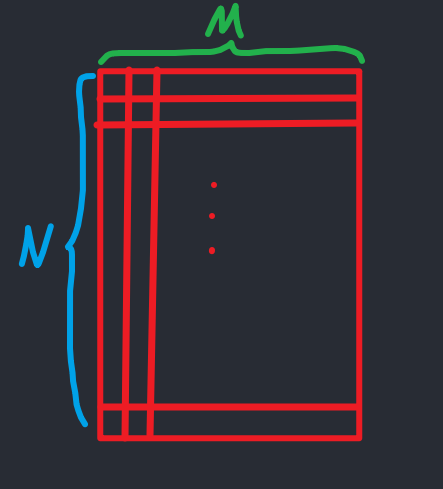
先不考虑图像的插值问题,假设图像矩阵大小与射频矩阵大小一致。DAS的整体流程为:
1 | graph TD |
反复重复以上操作,重复M*N次之后,完整的image矩阵就做出来了,使用这个图像矩阵就可以直接显示了,也可以基于此在做各类的算法进行图像优化。
2.3.2 DAS数学推导
也就是说:
- RF矩阵大小为
- 延迟阵大小为
- 图像阵大小为
- 如上所述,先默认认为,也就是构建的图像矩阵大小与射频矩阵大小相同
现在每个像素点对应一个延迟阵,成像域一共有个像素点,因此一共有个延迟阵D,为,,其中image中的第个像素点数值为:
其中为矩阵内积。注意如果RF数据为,图像想要,上面公式中的T就不能用m,n了,需要使用r,c来替代。
好的,目前,回顾一下,我们已经知道怎么求图像阵了,也有RF射频矩阵,目前不知道的只有延迟阵了,下面来求延迟阵:
我们之前已经假设了图像和换能器的行列数相同,那意味着图像列数与换能器阵元个数相同,图像行数与depth采样深度相同。
这里取为换能器阵列的x横坐标,为1个单位depth的延迟时间。
D矩阵计算步骤:
- 求点到各换能器阵元的距离
- 距离/c——>转换成延迟
- 通过延迟/求出格点的位置,并令这个位置的为1
- 完成D矩阵的构造
到此为止,一个完整的DAS流程就实现了,可以出图喽。